- →Why fatigue is a distinct and undermanaged risk in crane cabin operations
- →How crane operators differ fundamentally from vehicle drivers — and why this breaks conventional fatigue systems
- →What fatigue actually looks like in a crane cabin environment
- →Why camera-only detection is insufficient for industrial crane settings
- →How multimodal cognitive risk intelligence addresses the gap
- →What to evaluate when selecting a system for crane or overhead lifting operations
Why Crane Operator Fatigue Is a Distinct Safety Problem
Industrial organizations have invested heavily in equipment reliability, process automation, and safety barriers over the past two decades. Crane systems are more capable than ever. Load sensing, collision avoidance, and remote operation are increasingly standard. Yet one variable has remained stubbornly difficult to instrument and manage: the cognitive state of the operator in the cabin.
Crane operators in steel plants, ports, shipyards, mining operations, and heavy manufacturing typically work under conditions of sustained cognitive demand — long shifts, repetitive motion cycles, high-consequence decision-making, and environmental stressors including heat, noise, vibration, and isolation. These are not incidental conditions. They are the operational baseline.
Fatigue under these conditions does not present as sleep deprivation visible to a supervisor. It accumulates silently, degrades reaction time and decision quality, and may not manifest as a detectable behavioral change until the operator is already significantly impaired. By that point, the margin for error in a crane cabin may already be gone.
A suspended ladle of molten steel, a loaded container travelling overhead, or a coil of high-tonnage steel strip does not allow for a second chance. A delayed response of even two seconds — the window associated with a micro-sleep or attention lapse — changes the outcome of an event irreversibly.
The consequence asymmetry in crane operations is extreme. This makes continuous, objective monitoring of operator cognitive state not merely a compliance aspiration but an operational imperative — provided the monitoring system is designed for the environment it is deployed in. That qualification matters more than most procurement decisions acknowledge.
The Wrong Model: Why Automotive Fatigue Logic Fails in Crane Cabins
Most fatigue detection systems commercially available today were designed for road transport environments — truck fleets, haul vehicles, passenger cars, and locomotives. The underlying detection logic is built on a foundational assumption that is entirely valid for those contexts:
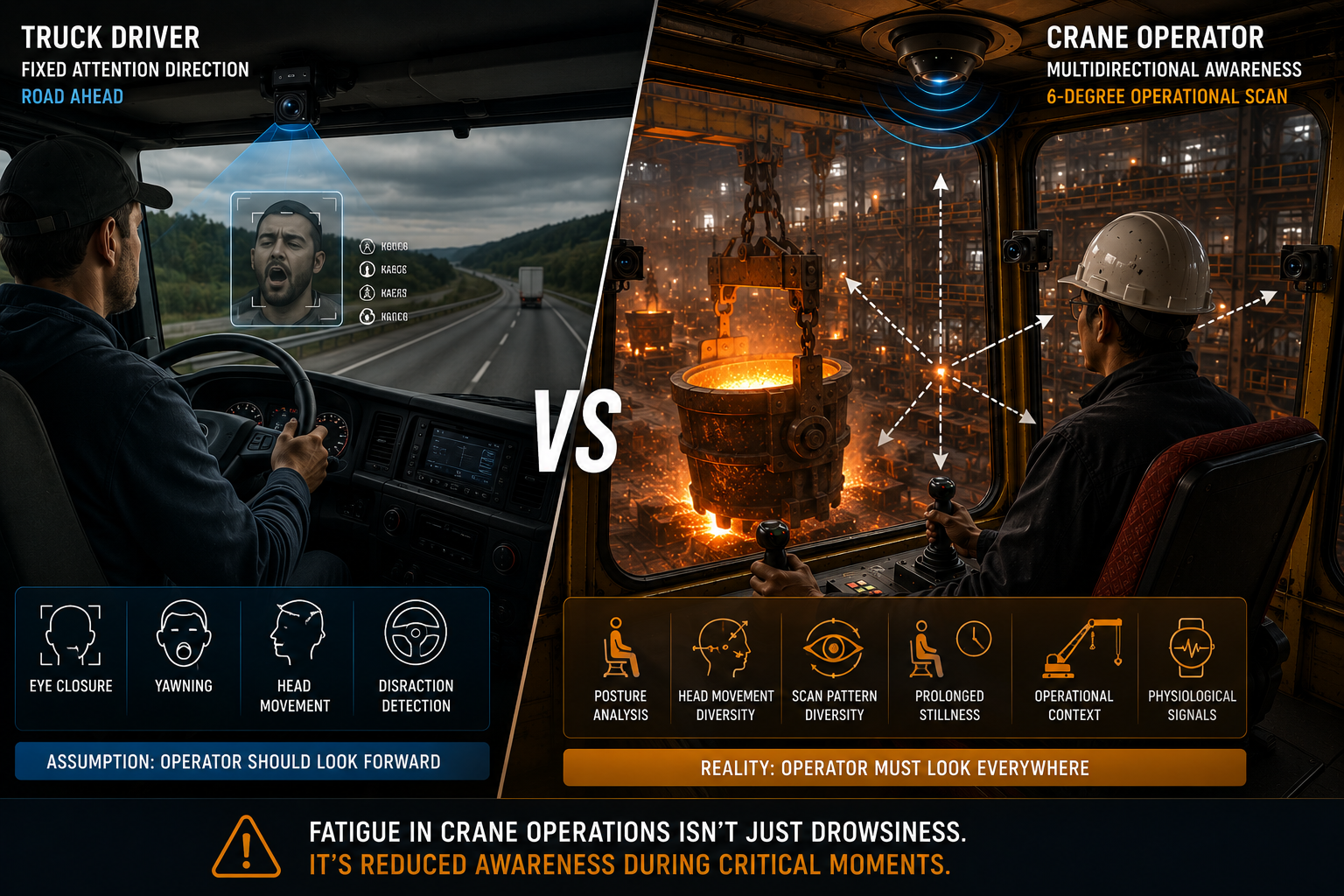
The operator's primary attention should be directed toward a known and fixed forward vector.
A truck driver is expected to face the road. An unexpected downward head pose, eyes drifting closed, or sustained gaze deviation away from the forward view are reliable indicators of drowsiness. Camera-based systems can confidently monitor PERCLOS, blink frequency, yawn frequency, and head pose — because the baseline is predictable and the expected attention direction is fixed.
This logic collapses entirely inside a crane cabin.
The Six-Dimensional Attention Environment
Unlike road drivers, crane operators do not have a primary attention direction. Their operational situational awareness must continuously cycle across six spatial dimensions simultaneously — and this is not distraction. It is the job.
Suspended load
Movement, swing dynamics, hook alignment, and load stability must be tracked continuously throughout the lift cycle.
Ground personnel
Riggers, slinger signalers, and ground crew position must be tracked across multiple zones, including areas with limited sightlines.
Spatial clearances
Overhead obstructions, adjacent equipment, and yard or plant conditions require constant peripheral scanning across all axes.
Cabin instrumentation
Load cells, limit indicators, operational displays, and alarms require periodic downward visual attention — which is normal and necessary.
In practical terms: a crane operator who faces forward and does not move is not demonstrating attentiveness. They may be demonstrating cognitive withdrawal — the early behavioral signature of fatigue-induced vigilance reduction.
An automotive fatigue system deployed in a crane cabin may generate sustained false alerts for a fully alert operator performing normal operational scanning — while simultaneously failing to detect genuine cognitive decline because the degraded behavior it should be detecting (reduced scanning, fixed posture, immobility) does not match its alert logic.
This is not a calibration problem. It is an architectural mismatch between the detection model and the operational environment. Recalibrating a road-transport algorithm for a crane cabin does not solve it; the behavioral baseline itself is different.
What Crane Operator Fatigue Actually Looks Like
Fatigue in crane operations rarely presents as the visible drowsiness that makes vehicle driver fatigue straightforward to detect. Eyelid drooping and head nodding — the primary signals that vision-based automotive systems are optimized for — typically appear late in the fatigue trajectory, after cognitive performance has already been degraded for a significant period.
In a crane cabin, the earlier and more operationally significant fatigue signal is behavioral: a measurable reduction in scanning diversity and postural variability.
An alert, experienced crane operator performing an active lift demonstrates high behavioral diversity. Head movement cycles through multiple axes. Body position shifts in response to load position. Visual attention shifts between load, ground, and instruments at a frequency consistent with the operational phase. This continuous micro-adaptation is not restlessness — it is competence expressed as behavior.
Under fatigue or cognitive decline, this behavioral signature narrows:
- ✓Continuous head movement across axes
- ✓Frequent load-tracking repositioning
- ✓Multi-zone visual scanning pattern
- ✓Responsive body posture adjustment
- ✓Periodic instrument checks at expected intervals
- ✓Consistent reaction to ground personnel signals
- ✕Prolonged fixed head position
- ✕Reduced scanning frequency and range
- ✕Visual fixation on single zone
- ✕Immobility during active suspended-load movement
- ✕Delayed or absent reaction to ground signals
- ✕Irregular instrument attention pattern
The diagnostic question in a crane cabin is not "Why is the operator moving?" — it is "Why has the operator stopped moving when the load is active?" Stillness during active operations is the warning signal, not movement. This inversion of the road-transport logic is not obvious, and it is systematically missed by systems built on automotive behavioral models.
There is a further complication. Fatigue in crane operations is sensitive to operational phase. An operator who is motionless during a crane idle period may be entirely normal — resting attention appropriately between cycles. The same operator motionless during a suspended-load transit phase represents an elevated risk that warrants immediate attention. Any detection system that cannot distinguish between these two states will either over-alarm or under-detect — frequently both simultaneously.
Why Camera-Only Systems Are Insufficient in Industrial Crane Settings
Vision-based fatigue detection remains the most commercially mature technology in this domain. For road transport, it is often the appropriate primary detection modality. For industrial crane operations, it is a valuable input — but an insufficient one when deployed alone.
Several factors compound in the crane cabin environment:
| Factor | Road transport impact | Crane cabin impact |
|---|---|---|
| PPE and helmets | LowDrivers typically helmeted | HighHard hats, visors, and hearing protection partially occlude face throughout shift |
| Lighting variability | LowDay/night variation managed by NIR | HighIndustrial lighting from multiple directions, reflective surfaces, molten metal glow create complex environments |
| Legitimate head movement | LowForward gaze baseline is valid | HighMulti-axis head movement is operationally required; cannot be flagged as anomaly |
| Operational context awareness | LowSpeed and lane data provide context | HighCrane phase (idle, slewing, lifting, lowering) radically changes what constitutes normal behavior |
| False alarm consequence | LowDriver can pull over; alert causes inconvenience | HighFalse alarm during active lift creates distraction risk; alarm fatigue causes operators to disable systems |
The false alarm dynamic deserves particular attention. In mining haul truck deployments, an elevated false positive rate is operationally costly but recoverable — the vehicle can be stopped, the operator assessed, and operations resumed. In a crane cabin during an active lift over personnel or critical equipment, an alerting event is itself a distraction risk. A system that cries wolf consistently will be disabled, bypassed, or ignored by operators and supervisors — often with the tacit acceptance of site management who have experienced the disruption.
High specificity — the ability to distinguish real cognitive risk from normal operational behavior — is therefore not a nice-to-have feature for crane applications. It is the primary engineering requirement. And specificity, in this environment, requires operational context, not just behavioral observation.
Multimodal Cognitive Risk Intelligence: What the Architecture Requires
Addressing the crane cabin environment requires combining multiple signal streams and interpreting them against operational state. No single sensor modality can provide the necessary combination of sensitivity, specificity, and contextual awareness.
The Four Signal Streams
Physiological signals
Heart rate variability (HRV), respiration rate, and skin-based biometrics via wearable devices. HRV degradation is one of the earliest measurable indicators of cumulative cognitive fatigue — preceding behavioral changes by significant margins. Wristwatch-format devices make continuous shift monitoring practical without disrupting operations.
Behavioral signals
Posture variability, head movement frequency and range, scanning pattern diversity, and immobility duration — measured against a baseline calibrated to the individual operator and the operational phase. The system measures behavioral entropy, not deviation from an assumed forward-facing norm.
Contactless sensing
mmWave radar mounted in the cabin provides micro-motion and respiration detection independent of camera occlusion or lighting conditions. Radar-derived stillness during active lift phases is a high-confidence risk indicator that does not require facial visibility.
Operational context
Crane motion state (idle, slewing, hoisting, lowering), load condition, hook height, shift elapsed time, and time-of-day circadian risk weighting. Every behavioral signal is evaluated against this context — the same behavior means different things at different operational phases.
Context-Weighted Fusion: What Makes It Different
The critical difference between a multimodal system and a camera system with additional sensors is not the number of inputs — it is how those inputs are interpreted together against operational state.
Consider two identical behavioral observations: an operator who is motionless and showing reduced HRV. Observation one occurs during crane idle with the hook at rest position at hour two of a day shift. Observation two occurs during an active lift, load suspended at height, at hour nine of a night shift. These are not equivalent risk events. A system that treats them identically will produce operational output that supervisors cannot act on meaningfully.
Context-weighted fusion assigns risk scores based on the combination of signal state and operational phase. The output is not an alert triggered by a threshold breach on a single sensor. It is a continuously updated cognitive risk score that reflects the actual operational significance of what is being observed — and escalates when the combination of signals and operational context warrants it.
Edge AI: Why Local Processing Matters in Industrial Environments
Industrial crane environments frequently operate under constraints that cloud-dependent safety systems cannot reliably accommodate. Connectivity in steel plants, foundries, port crane gantries, and mining structures ranges from intermittent to effectively absent in active operational zones. Data privacy requirements — particularly where biometric signals are involved — may restrict off-premises transmission. And the latency tolerance for a safety-critical alert is measured in milliseconds, not the seconds that a cloud round-trip introduces.
Edge AI processing — where signal fusion and risk scoring occur on hardware located in the cabin or on the local plant network — addresses all three constraints simultaneously. The system operates independently of connectivity state, keeps biometric data within the plant boundary, and produces real-time output without round-trip latency.
There is a less obvious benefit that matters operationally: local processing enables individual operator baseline calibration that improves with use. An edge system that has observed an operator across multiple shifts can distinguish their normal scanning pattern from a degraded one with considerably greater precision than a generic threshold applied to all operators. Population-level thresholds are necessary starting points; individual baselines are what make the system practically useful over time.
Evaluating Systems for Crane Applications: What to Ask Beyond the Brochure
Request validation data from actual crane cabin deployments in comparable industrial environments — not vehicle test tracks, laboratory conditions, or automotive fleet deployments. Detection accuracy figures from road transport do not transfer to overhead crane operations without significant qualification. Ask specifically about environments with PPE occlusion, variable industrial lighting, and multi-axis head movement baselines.
In crane applications, false positive rate is the primary quality metric — not sensitivity. Ask for false positive rates specifically during active lift phases, not pooled across idle and operational periods. A system that achieves 95% sensitivity but generates alerts during normal operational scanning will be disabled within weeks of deployment.
Ask how the system acquires crane operational state data — whether it reads crane control system outputs directly, uses onboard motion sensors, or relies solely on camera inference. Systems that cannot distinguish crane idle from active lift cannot correctly interpret behavioral signals. This is a fundamental architectural requirement, not a feature option.
Evaluate whether the vendor provides structured guidance on alert escalation workflows, supervisor notification protocols, and operator intervention procedures — or whether the system generates alerts and leaves process design entirely to the plant. Technology without escalation protocols produces data that sites do not know how to act on consistently.
Understand where biometric and behavioral data is processed and stored, who owns the data, retention periods, and how it can be accessed for incident investigation or safety audit. In Indian industrial contexts, understand how the system's data handling aligns with applicable IT Act provisions and any sector-specific regulatory requirements.
Verify that the system's core detection and alerting functions operate independently of network connectivity. In steel plants and heavy industrial environments, connectivity in active crane zones is frequently unreliable. A system whose primary functions depend on cloud connectivity is not a reliable safety system for these environments.
The most common failure mode in industrial crane fatigue monitoring deployments is not technology failure — it is model mismatch. Organizations select capable systems built for road transport, deploy them in crane cabins, experience high false alarm rates during normal operations, and either disable the system or accept that it will be ignored. The underlying technology may be technically sophisticated; the problem is that it is solving the wrong problem for this environment.
Crane cognitive risk monitoring requires starting from the crane cabin's operational reality — six-dimensional situational awareness, phase-dependent behavioral baselines, PPE occlusion, and the extreme consequence asymmetry of suspended-load operations — and building the detection architecture outward from those constraints. That means multimodal signal fusion, crane state integration, individual baseline calibration, and edge processing. It means measuring behavioral entropy against operational phase, not deviation from a forward-facing norm.
The practical outcome of getting this right is a system that supervisors trust, operators accept, and plant managers can act on. False alarm rates low enough that alerts carry operational weight. Risk scores that distinguish a fatigued operator at hour nine of a night shift, suspended load active, from a resting operator at hour two, crane idle. That distinction is the difference between a monitoring system and an operational safety capability.
Conclusion: What Industrial Safety Leaders Should Consider
Crane operator fatigue monitoring is a solved problem only in the sense that technology now exists to address it. The more important question — whether available systems are designed for the operational environment they are being deployed in — remains open for most industrial sites evaluating this space.
The distinction between a fatigue monitoring system and a cognitive risk intelligence system is not marketing language. In a crane cabin, it is the difference between a system that generates noise and one that generates actionable information. The former gets disabled. The latter changes outcomes.
For safety decision makers in steel, ports, mining, and heavy manufacturing, the evaluation criteria that matter most are not camera resolution or detection sensitivity in controlled conditions. They are false alarm rates under operational crane conditions, integration with crane state data, edge processing independence, and the quality of the escalation process that surrounds the technology. Getting those elements right determines whether the investment produces lasting safety improvement or another layer of installed hardware that operations learns to work around.
Evaluating fatigue monitoring for overhead crane, ladle crane, or industrial lifting operations? GoatAI DFMS is designed for the operational realities of heavy industrial environments — multimodal detection, crane state integration, and edge AI processing for facilities where connectivity and latency constraints make cloud-dependent systems impractical.